新版更新内容
支持UVC摄像头
如果摄像头有唯一序列号,机器人控制器会根据序列号检测并列举摄像头,如果没有唯一序列号,则只支持使用一个摄像头。
支持一些摄像头(如微软HD3000,罗技C310/C920)的配置设置,并支持通过Web界面上传和管理配置文件(见TeamCode/src/main/res/xml/teamwebcamcalibrations.xml)。配置文件包含画面分辨率、焦距等信息。
增加Vuforia视觉导航和VuMark相关的示例OP Mode,其中说明了如何用手机内置摄像头或外置摄像头来进行视觉识别。
可能有一些摄像头在工作时电流消耗过大,导致外置摄像头在安装到基于手机的机器人控制器中后会出现一些问题。而不依赖手机工作的REV Robotics Control Hub控制器则不受此影响。目前FTC技术团队正在进行进一步调查研究。
支持新的马达控制模式
配合REV Expansion Hub的1.8版固件,FTC机器人将可以支持前馈式马达控制。
新的内置马达控制模式为PIDF(比例、积分、微分、前馈),这种控制方式更加线性和精确。
在程序中可以修改PIDF的控制参数,Blocks编程工具也具备相应功能。
旧的内置PID控制功能已经废弃。
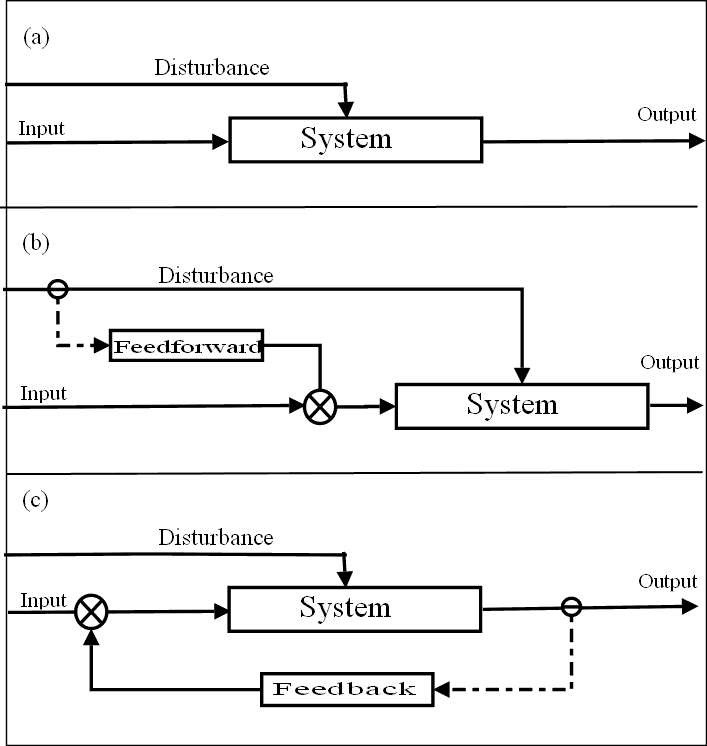
图a为开环控制,b为前馈式控制,c为闭环控制。右键另存为可保存大图。
无线网络
支持机器人控制器和操控站之间的5GHz无线网络通讯,已经在Moto G5、E4和三星S8中测试通过。
强化为REV Expansion Hub更新固件的功能
增强通过手机更新固件的稳定性。
在更新固件时,不必断开两个通过RS485线连在一起的模块之间的连线。但只能更新直接与手机相连的那个模块的固件。
目前仍然需要通过USB线更新固件。
即使刷固件时模块变砖了,机器人控制手机依然可以识别这个模块并重新安装固件。这样使得固件升级的风险更低,也是从技术角度鼓励大家尽快升级到功能强大的1.8版固件。
可用性
Expansion Hub固件升级到1.8版后开始支持FTDI自动重启功能。如果Expansion Hub检测到自己断开了与手机的连接,就会尝试自动重启,增加了控制器的稳定性,降低了机器人控制器因静电(ESD)断连的风险。
更多关于防止ESD的信息请参考:Managing Electrostatic Discharge Effects
Blocks编程工具
修复了blocks编程工具向Java导出时字符串和列表的错误。
优化本赛季相关的图像识别代码。
增加马达的PIDF支持。
支持用户自定义小数点后的位数。
支持在操控站播放自定义音频文件。
修复下载图像文件时的错误。
添加对规则上允许的新设备的支持。
增加了DcMotorEx相关的控制方法。
支持调节马达速度和PIDF参数等。
日志改进
降低了检测电池状态的频率。
减少了与FTC无关的日志。在根据日志追溯机器人故障时可以更轻松一些。
操作手可以在操控站设置比赛场次号,场次号将会被记录在日志文件中。文件被存储在手机的/sdcard/FIRST/matlogs目录下。
新设备支持
开始支持以下硬件设备,在SDK中提供相应的类:REV Robotics Blinkin LED Controller、REV Touch Sensor。
提供REV 20:1 HD Hex Motor的配置文件选项。
杂项
修复java文档中的关于加速度的一些描述性错误
在操控站可以播放音频文件。
在配置Expansion Hub时,正在被配置的模块LED会以特殊颜色给出提示,这样就能轻松判断出你正在配置哪个模块。
I2cDeviceType名称改为I2cSensorType。
增加了本赛季视觉识别定位相关示例OP Mode。
增加了与REV Robotics 2m Laser Distance Sensor、REV Robotics Blinkin LED Controller两个设备相关的示例OP Mode。
将示例OP Mode文件重新进行了分类。
已知问题
UVC摄像头
在基于安卓手机的控制系统中使用某一些摄像头时依然会出现问题。如果摄像头安装到安卓7.0设备上,会偶发性的停止响应。
无线网络
虽然可以设置Wi-Fi频道,但是手机重启后会丢失之前的设置。而且Wi-Fi频道暂时无法正常显示。
杂项
如果刚刚新建一个配置文件,REV模块上的LED灯不会根据正修改的配置文件进行提示。
官方wiki在coming一年之后终于更新了一篇新文章:Managing Electrostatic Discharge Effects